모바일 로봇 조종을 위해 우분투(18.04)에 xbox 컨트롤러를 연결해야될 일이 있었음.
하지만 계속 connect되었다가 disconnected 되는 문제를 겪음. 아래는 그에 대한 해결 방법 및 연결 방법에 대한 서술임.
1. [필요한 것 설치하기]
1-1
$ ls | grep xpad로 드라이버 설치 유무 확인 후 없으면 설치
1-2
새로운 xbox 컨트롤러라면 윈도우에 usb로 연결 후 microsoft store에서 xbox accessories를 설치하여 xbox 컨트롤러 펌웨어 업데이트 진행
1-3
블루투스 관리 유틸리티 설치를 위해 아래 명령어를 입력
$ sudo apt update
$ sudo apt install bluetooth bluez bluez-tools
1-4
조이스틱 설정 및 테스트를 위해 아래 패키지를 설치
$ sudo apt install joystick jstest-gtk
2. [연결하기]
1번 항목 과정을 모두 했다면,
2-1
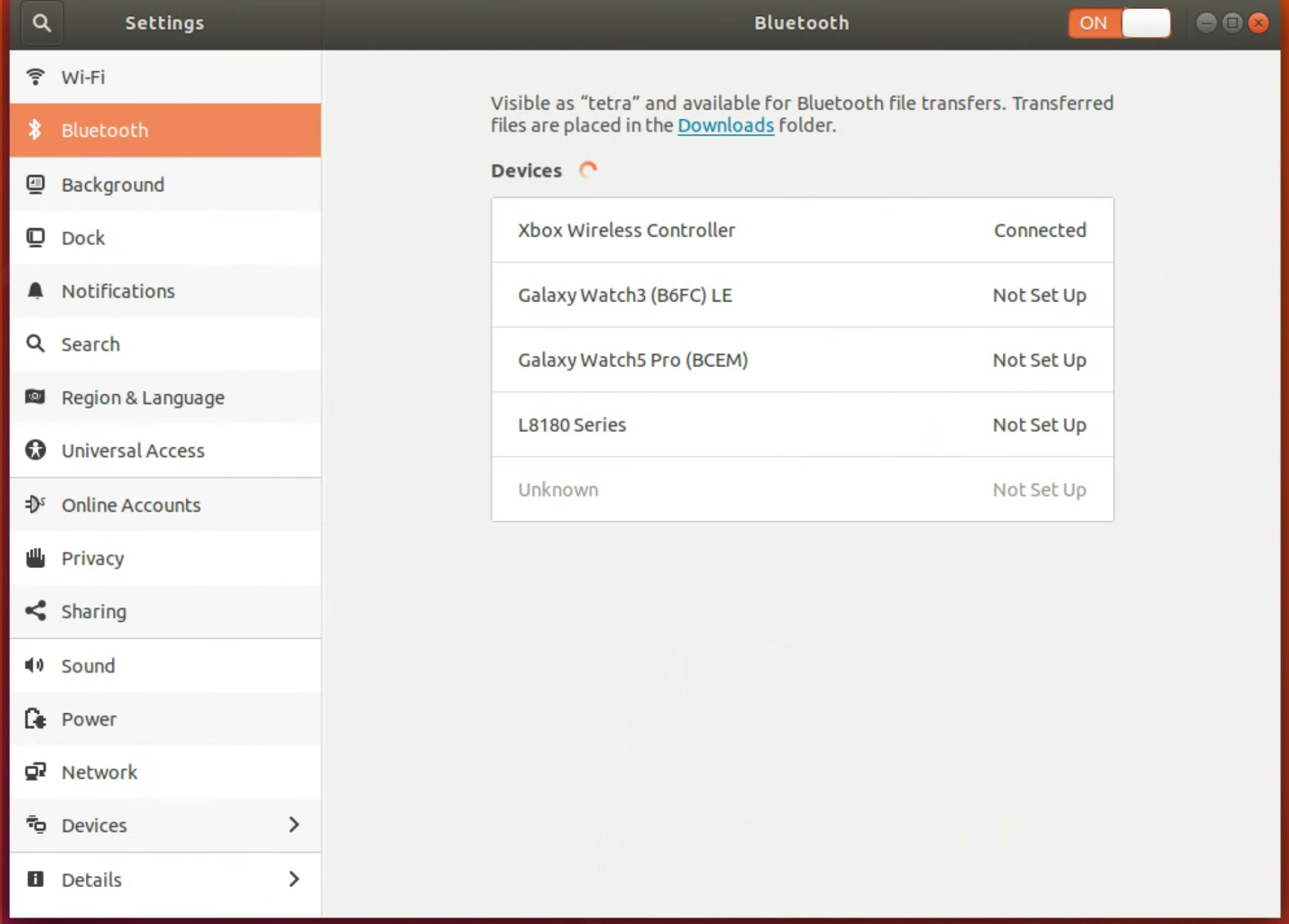
기존에 블루투스를 이용해서 xbox 컨트롤러와 연결하였다면, 먼저 우분투에서 setting -> bluetooth -> xbox 컨트롤러 연결 기록 & 목록에서 remove를 함.
2-2
$ sudo modprobe xpad
2-3
$ sudo systemctl restart bluetooth로 블루투스 재시작
혹은
$ sudo systemctl stop bluetooth
$ sudo systemctl start bluetooth
2-4
블루투스 연결을 위해 아래 명령어를 입력해서 bluetoothctl을 실행함.
$ bluetoothctl
그 후 xbox 컨트롤러 전원 on -> 페어링 버튼 누름 (페어링 버튼이 눌리면 가운데 하얀 로고가 빠르게 점멸함.)
bluetoothctl 목록에서
"[NEW] Device XX:XX:XX:XX:XX:XX Xbox Wireless Controller" 가 나오면 mac 주소를 복사함.
$ pair XX:XX:XX:XX:XX:XX
$ trust XX:XX:XX:XX:XX:XX
$ connect XX:XX:XX:XX:XX:XX
를 순차적으로 입력함. (단, unsuccessful 혹은 부정적인 의미가 뜨면 다시 시도할 것.)
2-5
연결 테스트를 위해
$ jstest-gtk <- jstest-gtk를 실행
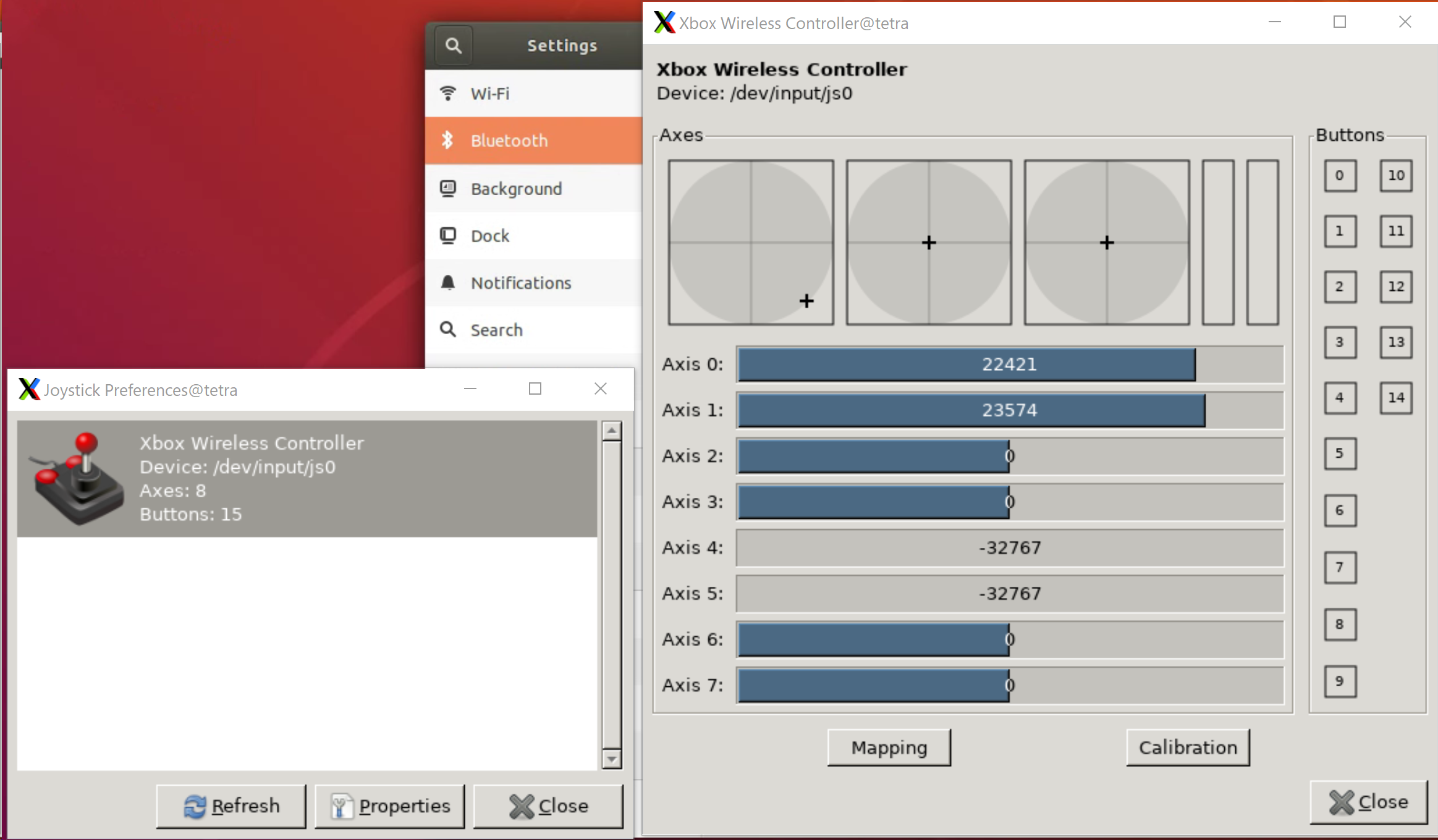
위 그림과 같이 정상적으로 동작함을 알 수 있음.
이제 더 이상 teleop 안써도 됨. good!
'ROS(Robot Operating System)' 카테고리의 다른 글
| 라즈베리 파이 4 우분투 20.04 데스크탑 버전 설치 후 WiFi 연결 안되는 문제 해결에 대하여 (0) | 2025.01.10 |
|---|---|
| ROS, anaconda 설치 후 패키지 실행 시 ImportError: No module named yaml 에러 발생 시 해결 방법 (0) | 2024.07.28 |
| ROS_DISTRO was set to 'noetic' before 문제 해결 방법 (0) | 2024.01.24 |
| turtlebot3(터틀봇3)에 Humble 설치 시 유의사항 (1) | 2023.06.27 |
| ydlidar x4 Error, cannot retrieve YDLidar health code: ffffffff 해결방법 (0) | 2023.03.07 |
