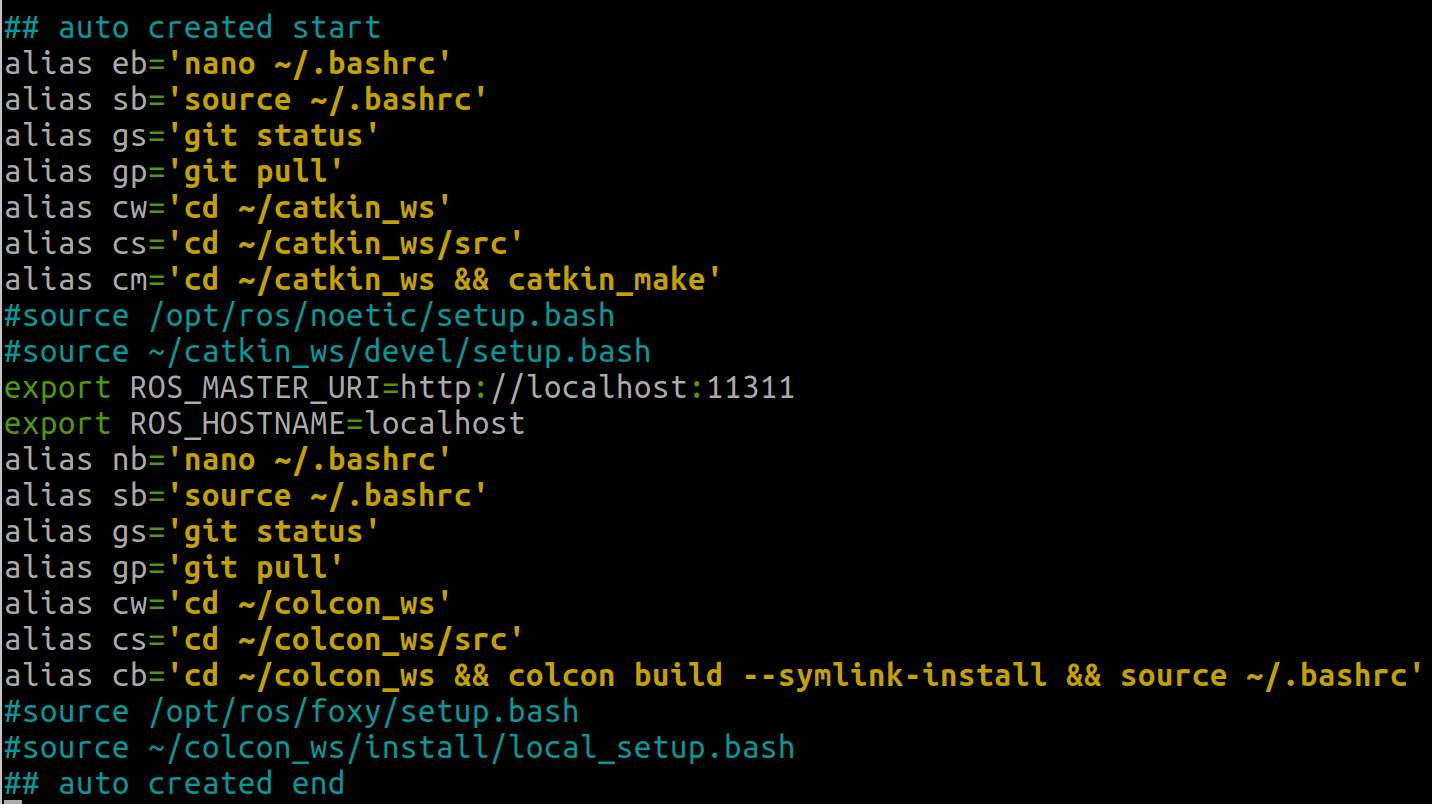
ros1과 ros2를 같이 설치하였을 때 생기는 문제이다.
해결 방법은 아래와 같이 bashrc에서 ros1과 ros2를 source하는 부분을 주석 처리하는 방법이다.
'ROS(Robot Operating System)' 카테고리의 다른 글
| turtlebot3(터틀봇3)에 Humble 설치 시 유의사항 (0) | 2023.06.27 |
|---|---|
| ydlidar x4 Error, cannot retrieve YDLidar health code: ffffffff 해결방법 (0) | 2023.03.07 |
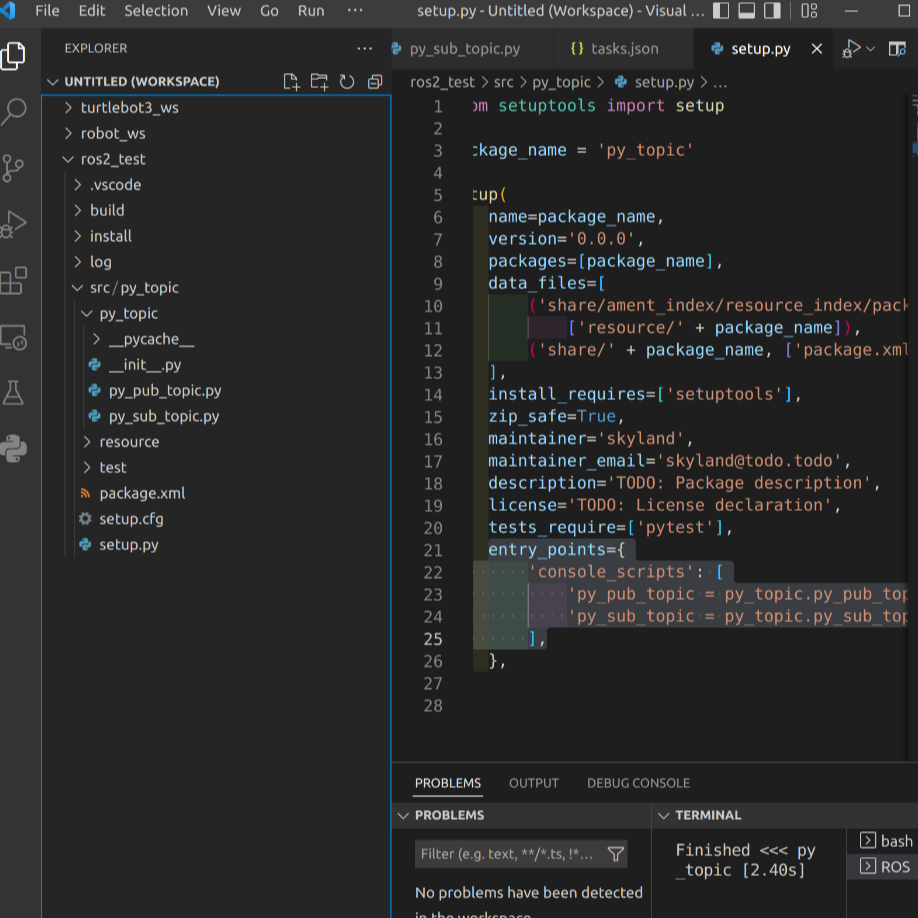
| [ROS2] 파이썬 setup.py의 entry_points 명령 규칙 (0) | 2022.04.12 |